TB6600 स्टेपर मोटर कंट्रोलर: पिनआउट, Arduino इंटरफ़ेस, और यह कैसे काम करता है
सूची

TB6600 स्टेपर मोटर ड्राइवर मॉड्यूल का अवलोकन
TB6600 स्टेपर मोटर ड्राइवर मॉड्यूल एक उपकरण है जो 2-चरण स्टेपर मोटर्स को नियंत्रित करने के लिए इसके लचीलापन और अनुकूलनशीलता से प्रतिष्ठित है।यह मूल रूप से माइक्रोकंट्रोलर की एक विस्तृत सरणी से जुड़ता है, ज्यादातर Arduino, सटीक 5V डिजिटल पल्स आउटपुट के निर्माण को बढ़ावा देता है।ये आउटपुट मोटर नियंत्रण के नाजुक संतुलन को बनाए रखने के लिए गतिशील हैं।9-42V डीसी की एक वोल्टेज रेंज के भीतर काम करना और 4 एम्प्स के पीक करंट का समर्थन करना, यह विभिन्न मोटर-चालित परियोजनाओं के लिए एक बहुमुखी विकल्प है।यह अनुकूलनशीलता आपको मोटर पोजिशनिंग और स्पीड को कुशलता से प्रबंधित करने की अनुमति देती है, जो उन अनुप्रयोगों में अत्यधिक फायदेमंद है जो कोडिंग जटिलता को कम करने के लिए हैं।मॉड्यूल का उच्च-आवृत्ति ऑप्टोकॉपर अलगाव हस्तक्षेप जोखिमों को कम करके और स्थिर संचालन सुनिश्चित करके इसकी विश्वसनीयता को काफी बढ़ाता है।
कई माइक्रोकंट्रोलर्स के साथ सामंजस्य TB6600 ड्राइवर को जटिल मोटर नियंत्रण की आवश्यकता वाली परियोजनाओं के लिए एक फिटिंग विकल्प बनाता है।यह Arduino जैसे प्लेटफार्मों के साथ सुचारू रूप से एकीकृत करता है, जो विविध अपेक्षाओं को पूरा करने की अपनी क्षमता को दर्शाता है।उदाहरण के लिए, सीएनसी मशीनों या 3 डी प्रिंटर में इस ड्राइवर का उपयोग करना सटीक और नियंत्रित आंदोलन को सक्षम करता है, जो विभिन्न क्षेत्रों में इसकी उपयोगिता को दर्शाता है।
यह मॉड्यूल 2-चरण और 4-चरण स्टेपर मोटर्स के साथ-साथ हाइब्रिड कॉन्फ़िगरेशन दोनों के लिए अपने समर्थन के लिए धन्यवाद देता है।द्विध्रुवी एच-ब्रिज डिज़ाइन वोल्टेज और करंट को कुशलता से प्रबंधित करने के लिए अभिन्न है, यह सुनिश्चित करने के लिए कि ड्राइवर अपने अनुप्रयोगों में चरम प्रदर्शन को वितरित करता है।ऐसे वातावरण में जहां सटीक और विश्वसनीयता को प्राथमिकता दी जाती है, जैसे कि स्वचालित उत्पादन लाइनें और रोबोटिक्स, ये सुविधाएँ अत्यधिक मूल्यवान हैं।
विशेषताएँ
|
विशेषता |
विवरण |
|
चालक प्रकार |
द्विध्रुवी एच-ब्रिज डीसी ड्राइवर |
|
आउटपुट वर्तमान विकल्प |
8 प्रकार (0.5a से 3.5a), 4 amps तक का चयन करें |
|
उपखंड मोड |
32 तक विभाजित करता है, 6 मोड में चयन करने योग्य |
|
सूक्ष्म चरण विकल्प |
8 प्रकार (1, 2/ए, 2/बी, 4, 8, 16, 32) |
|
इनपुट सिग्नल अलगाव |
उच्च गति वाले फोटोइलेक्ट्रिक पृथक्करण |
|
इंटरफ़ेस |
पूर्ण मानक एकल पल्स इंटरफ़ेस |
|
ऑफ़लाइन पकड़ समारोह |
हाँ |
|
पर्यावरणीय उपयुक्तता |
कठोर वातावरण के लिए अर्ध-संलग्न शरीर |
|
प्रॉवर लॉक फ़ंक्शन |
अर्ध-स्वचालित, ऊर्जा-बचत |
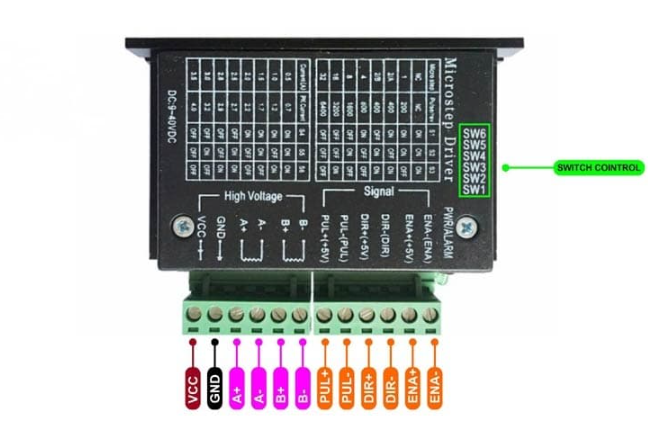
पिन विन्यास
तकनीकी चश्मा
|
विनिर्देश |
विवरण |
|
ऑपरेटिंग वोल्टेज |
9-40V डीसी |
|
आउटपुट करेंट |
0.7A-4.0A (डिप स्विच के माध्यम से 8 चरणों में चयन करने योग्य) |
|
इनपुट पल्स आवृत्ति |
20kHz तक |
|
इनपुट संकेत स्तर |
5V सिग्नल का स्तर |
|
क्रांति प्रति पल्स |
200-6400 |
|
तर्क -संकेत वर्तमान |
8A-15A |
|
मोटर संगतता |
2-चरण और 4-चरण स्टेपर मोटर्स के लिए उपयुक्त |
|
संरक्षण सुविधाएँ |
ओवरक्रैक, ओवरहीट संरक्षण |
|
इनपुट अलगाव |
वैकल्पिक रूप से अलग -थलग |
|
इन्सुलेशन प्रतिरोध |
500 megohms |
|
समर्थित विधा |
पल्स/देवदार विधा |
|
लागत |
कम लागत |
TB6600 के लिए एच-ब्रिज सर्किट कॉन्फ़िगरेशन
TB6600 स्टेपर मोटर ड्राइवर मॉड्यूल एक गंभीर घटक है जिसे 2-चरण और 4-चरण स्टेपर मोटर्स दोनों को नियंत्रित करने के लिए डिज़ाइन किया गया है, जो कुशल संचालन के लिए द्वि-ध्रुवीय एच-ब्रिज कॉन्फ़िगरेशन का उपयोग करता है।यह कॉन्फ़िगरेशन वर्तमान हैंडलिंग और थर्मल स्थिरता के संदर्भ में उच्च प्रदर्शन सुनिश्चित करने के लिए MOSFET ट्रांजिस्टर को नियुक्त करता है।मॉड्यूल दो प्राथमिक नियंत्रण पिन के साथ बातचीत करके संचालित होता है: स्टेप पिन, जो प्रत्येक पल्स के साथ मोटर स्टेपिंग को ट्रिगर करता है, और दिशा पिन, जो लागू वोल्टेज के आधार पर मोटर की घूर्णी दिशा को निर्धारित करता है।साथ में, ये इनपुट मोटर के कदम अनुक्रम और रोटेशन की दिशा पर सटीक नियंत्रण को सक्षम करते हैं।
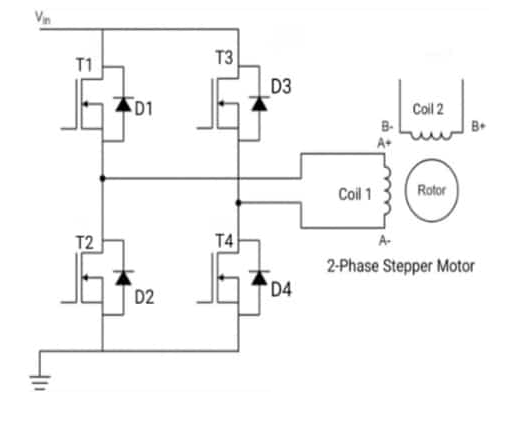
सर्किट आरेख में चार प्रमुख ट्रांजिस्टर, T1, T2, T3 और T4 पर प्रकाश डाला गया है, जो H- ब्रिज संरचना में व्यवस्थित है।ये MOSFETs मॉड्यूल के संचालन की रीढ़ हैं, जो स्टेपर मोटर को चलाने के लिए आवश्यक वर्तमान के द्विदिश प्रवाह के लिए अनुमति देते हैं।इसके अलावा, आरेख में फ्लाईबैक डायोड (डी 1, डी 2, डी 3, और डी 4) शामिल हैं, जो मोटर के प्रेरक लोड के कारण वोल्टेज स्पाइक्स से सर्किट की रक्षा के लिए महत्वपूर्ण हैं।ये डायोड ऑपरेशन के दौरान संवेदनशील घटकों को ओवरक्रैक और नुकसान को रोकते हैं।मोटर शाफ्ट के सटीक और नियंत्रित आंदोलन को सुनिश्चित करने के लिए मोटर को जोड़ने के लिए A+, A-, B+, और B- टर्मिनलों का उपयोग किया जाता है।
एच-ब्रिज मोटर रोटेशन को कैसे सक्षम करता है?
TB6600 ड्राइवर एच-ब्रिज में MOSFET ट्रांजिस्टर की समन्वित कार्रवाई के माध्यम से संचालित होता है।उदाहरण के लिए:
• क्लॉकवाइज रोटेशन तब होता है जब ट्रांजिस्टर टी 1 और टी 4 सक्रिय होते हैं, ए से ए से ए से वर्तमान प्रवाह को निर्देशित करते हैं।
• काउंटर-क्लॉकवाइज रोटेशन तब होता है जब T2 और T3 लगे होते हैं, वर्तमान प्रवाह को A- A से+तक उलट देते हैं।
ट्रांजिस्टर की यह वैकल्पिक सक्रियण सुचारू द्विदिश गति सुनिश्चित करता है।इष्टतम टोक़ और कुशल संचालन प्राप्त करने के लिए, सटीक समय और वोल्टेज विनियमन आवश्यक हैं।
बहुमुखी नियंत्रण के लिए संचालन के मोड
TB6600 चार अलग -अलग ऑपरेटिंग मोड का समर्थन करता है, प्रत्येक को एप्लिकेशन आवश्यकताओं के आधार पर टोक़, सटीकता और चरण आकार को संतुलित करने के लिए डिज़ाइन किया गया है:
• तरंग विधा: इस मोड में, एक समय में केवल एक कॉइल को सक्रिय किया जाता है।एक एकल कॉइल को सक्रिय करने से मोटर को एक दिशा में 90 डिग्री तक घुमाता है, जबकि वर्तमान को उलट देता है इसे विपरीत दिशा में घुमाता है।कॉइल के बीच बारी -बारी से, मोटर निरंतर संचालन को प्राप्त करता है।यह मोड सरल है, लेकिन अन्य मोड की तुलना में कम टोक़ प्रदान करता है।
• पूर्ण-चरण विधा: दोनों कॉइल इस मोड में एक साथ सक्रिय हैं, एक मजबूत चुंबकीय क्षेत्र उत्पन्न करते हैं।यह बढ़ा हुआ टॉर्क है, जिससे यह अधिक शक्ति और स्थिरता की आवश्यकता वाले अनुप्रयोगों के लिए आदर्श है।
• आधा-चरण विधा: वेव मोड और पूर्ण-चरण मोड का एक संयोजन, यह मोड एक एकल कॉइल और दोनों कॉइल को सक्रिय करने के बीच वैकल्पिक है।यह प्रभावी रूप से चरण आकार को 45 डिग्री तक कम कर देता है, सटीक और टोक़ के बीच संतुलन प्रदान करता है।हालांकि, टोक़ इस बात पर निर्भर करता है कि एक या दोनों कॉइल एक विशेष कदम के दौरान सक्रिय हैं या नहीं।
• माइक्रोस्टेप मोड : सभी मोड में सबसे सटीक, माइक्रोस्टेप मोड मोटर चरणों के माध्यम से वर्तमान को सावधानीपूर्वक संशोधित करके भी कदम आकार को कम करता है।यह कदमों के बीच चिकनी और क्रमिक संक्रमण बनाने के लिए उन्नत सर्किटरी का उपयोग करके प्राप्त किया जाता है।यह मोड उच्च परिशुद्धता और सुसंगत टोक़ की आवश्यकता वाले अनुप्रयोगों के लिए आदर्श है, जैसे कि सीएनसी मशीन या रोबोटिक्स।
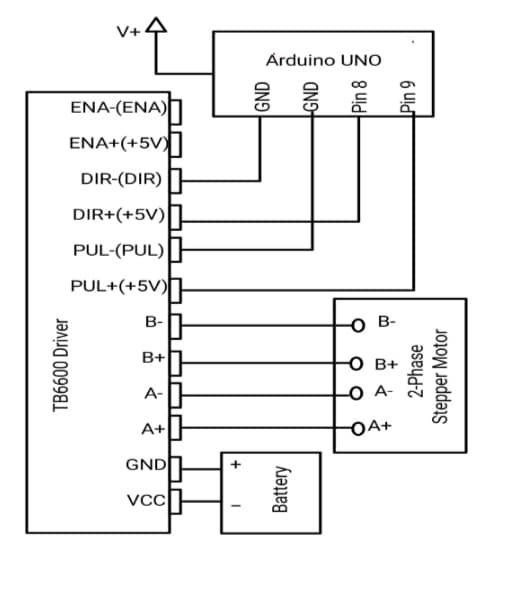
Arduino UNO के साथ TB6600 को एकीकृत करना
स्टेपर मोटर्स के कुशल नियंत्रण के लिए विश्वसनीय हार्डवेयर और सावधानीपूर्वक प्रोग्राम किए गए सॉफ़्टवेयर के संयोजन की आवश्यकता होती है।TB6600 स्टेपर मोटर ड्राइवर 2-चरण स्टेपर मोटर्स के संचालन के लिए एक उत्कृष्ट उपकरण के रूप में खड़ा है।यह कई परिचालन मोड का समर्थन करता है, जैसे कि वेव, फुल-स्टेप, हाफ-स्टेप और माइक्रो-स्टेपिंग।इसकी अंतर्निहित सुरक्षा सुविधाएँ-कम वोल्टेज, ओवरक्रैक, और ओवरहीटिंग के खिलाफ सुरक्षा उपायों सहित-इसे सटीक और स्थायित्व की मांग करने वाली परियोजनाओं के लिए एक ठोस विकल्प बनाते हैं।
एक Arduino UNO के साथ TB6600 स्थापित करने के लिए, निम्नलिखित घटकों को इकट्ठा करें:
• ARDUINO UNO R3
• TB6600 स्टेपर मोटर ड्राइवर (4 ए संस्करण)
• स्टेपर मोटर (1.65 ए की अनुशंसित रेटिंग के साथ)
• विश्वसनीय बिजली की आपूर्ति (जैसे, एक बैटरी या विनियमित डीसी पावर स्रोत)
• जम्पर तार
• Arduino ide आपके कंप्यूटर पर स्थापित है
Arduino के साथ TB6600 को एकीकृत करने के लिए, इन विस्तृत निर्देशों का पालन करें
दिशा और पल्स सिग्नल कनेक्ट करें
• DIR+ और PUL+ टर्मिनलों को TB6600 पर क्रमशः Arduino Pins 8 और 9 से लिंक करें।ये पिन दिशा और पल्स सिग्नल भेजते हैं।
• Arduino की जमीन (GND) पिन के लिए DIR- और PUL- टर्मिनलों को संलग्न करें।
• मोटर को TB6600 से कनेक्ट करें: TB6600 टर्मिनलों के लिए स्टेपर मोटर तारों को संलग्न करें।
• मोटर के एक कॉइल के लिए A+ और A-।
• B+ और B- अन्य कॉइल के लिए।
• TB6600 ड्राइवर को पावर करें: अपनी बिजली की आपूर्ति के लिए TB6600 पर VCC और GND पिन को कनेक्ट करें।सुनिश्चित करें कि वोल्टेज क्षति से बचने के लिए आपकी मोटर और ड्राइवर की आवश्यकताओं से मेल खाता है।
माइक्रोस्टेप संकल्प को समायोजित करना
TB6600 आपको SW1 और SW2 स्विच का उपयोग करके स्टेपर मोटर के आंदोलन की सटीकता को ठीक करने की अनुमति देता है।इन स्विचों को निम्नानुसार समायोजित करें:
• Step स्टेप रिज़ॉल्यूशन: SW1 ऑन और SW2 बंद करें।
• Step स्टेप रिज़ॉल्यूशन: SW1 OFF और SW2 चालू करें।
• 1/32 स्टेप रिज़ॉल्यूशन: SW1 और SW2 दोनों को सेट करें।
• पूर्ण-चरण मोड: SW1 और SW2 दोनों को सेट करें।
ट्रुथ टेबल
|
SW2 |
माइक्रोस्टेप संकल्प |
|
बंद |
1/32 कदम |
|
पर |
1/8 कदम |
|
बंद |
1/4 कदम |
|
पर |
पूर्ण कदम |
स्विच समायोजन आपको अपनी परियोजना की जरूरतों के आधार पर सटीकता और गति के बीच संतुलन का अनुकूलन करने की अनुमति देता है।
यह सुनिश्चित करने के लिए कि आपकी मोटर सुरक्षित वर्तमान सीमाओं के भीतर संचालित होती है, TB6600 में वर्तमान प्रवाह को समायोजित करने के लिए अतिरिक्त स्विच (SW4 और SW6) की सुविधा है।ये सेटिंग्स इसके लिए उपयोगी हैं:
• अधिभार क्षति को रोकना।
• लगातार मोटर प्रदर्शन को बनाए रखना।
• हमेशा सत्यापित करें कि मोटर करंट दोनों घटकों की सुरक्षा के लिए ड्राइवर के अधिकतम 4A के नीचे रहता है।
• नियंत्रण मोटर दिशा: यदि आप चाहते हैं कि मोटर एंटीक्लॉकवाइज को घुमाएं, तो अपने Arduino कोड में DIR+ पिन की स्थिति को संशोधित करें।
• परीक्षण और समस्या निवारण: सेटअप पूरा करने के बाद, वायरिंग और ड्राइवर की कार्यक्षमता को सत्यापित करने के लिए एक बेसिक स्टेपर मोटर कंट्रोल स्केच अपलोड करें।
• ओवरहीटिंग से बचें: TB6600 ड्राइवर के लिए उचित वेंटिलेशन सुनिश्चित करें, विशेष रूप से उच्च-वर्तमान अनुप्रयोगों में।
अनुप्रयोग
TB6600 मॉड्यूल कई क्षेत्रों में एक सक्रिय भूमिका निभाता है जहां सावधानीपूर्वक मोटर नियंत्रण का उपयोग किया जाता है।इसकी अनुकूलन क्षमता विभिन्न कार्यान्वयन के माध्यम से चमकती है जो इसकी अनूठी क्षमताओं को उजागर करती है:
एंटीना पोजिशनिंग
दूरसंचार के क्षेत्र में, गुणवत्ता संकेत रिसेप्शन और ट्रांसमिशन के लिए इष्टतम एंटीना संरेखण प्राप्त करना अनिवार्य है।TB6600 सटीक आंदोलन की सुविधा देता है, जिससे संचार प्रणालियों की प्रभावशीलता बढ़ जाती है।
स्टेपर मोटर प्रबंधन
स्वचालन और रोबोटिक्स के भीतर, सटीक स्टेपर मोटर हैंडलिंग को TB6600 के माध्यम से प्राप्त किया जाता है, जिससे आप आंदोलन सटीकता और बोल्ट सिस्टम विश्वसनीयता को परिष्कृत कर सकते हैं।
सीएनसी संचालन
कंप्यूटर संख्यात्मक नियंत्रण (CNC) मशीनों के लिए, TB6600 जटिल कटिंग और मिलिंग प्रक्रियाओं को बढ़ाता है, जिससे आप अपने काम में उच्च स्तर की सटीकता और दोहराने योग्य सटीकता बनाए रखने में सक्षम होते हैं।
3 डी मुद्रण परिशुद्धता
एडिटिव मैन्युफैक्चरिंग, विशेष रूप से 3 डी प्रिंटिंग में, TB6600 विस्तृत मोटर नियंत्रण प्रदान करता है, जो जटिल आकृतियों और रूपों को क्राफ्टिंग के लिए आवश्यक प्रिंट हेड की सटीक स्थिति का समर्थन करता है।
जटिल मोटर नियंत्रण
मॉड्यूल जटिल स्वचालन प्रणालियों के भीतर जटिल मोटर नियंत्रण कार्यों के लिए मूल्यवान है, दक्षता बढ़ाने और परिष्कृत प्रबंधन को सक्षम करने के लिए मूल्यवान है।
गति, स्थिति और रोटेशन का नियंत्रण
सटीक गति और घूर्णी नियंत्रण की आवश्यकता वाले परिदृश्यों में TB6600 एक्सेल, ज्यादातर लगातार बदलते वातावरण में प्रदर्शन को अनुकूलित करने के लिए उपयोग किया जाता है।
इमेजिंग उपकरण और बैंकिंग प्रणालियाँ
मॉड्यूल चिकनी, सटीक मोटर आंदोलनों को सुनिश्चित करके कैमरों और एटीएम के विश्वसनीय संचालन का समर्थन करता है, जो उपकरणों के परिचालन जीवनकाल का विस्तार करता है।
उत्कीर्णन उपकरणों में सटीकता
उत्कीर्णन उपकरण और मशीनरी के लिए, TB6600 बारीक विस्तृत डिजाइनों को निष्पादित करने के लिए आवश्यक सटीक नियंत्रण प्रदान करता है, उद्योगों में एक खतरनाक कारक जहां सटीक और विस्तार प्रमुख हैं।
हमारे बारे में
ALLELCO LIMITED
और पढो
त्वरित पूछताछ
कृपया एक जांच भेजें, हम तुरंत जवाब देंगे।
अक्सर पूछे जाने वाले प्रश्नों [FAQ]
1। टीबी 6600 ड्राइवर के लिए मुझे किस बिजली की आपूर्ति का उपयोग करना चाहिए?
TB6600 स्टेपर मोटर ड्राइवर 8V और 45V के बीच बिजली की आपूर्ति वोल्टेज के साथ काम करता है।
2। मैं TB6600 के साथ स्टेपर मोटर की गति को कैसे नियंत्रित कर सकता हूं?
TB6600 मोटर गति को समायोजित करने के लिए पल्स-चौड़ाई मॉड्यूलेशन (PWM) का उपयोग करता है।आप PWM आवृत्ति को संशोधित करके गति को बदल सकते हैं।
3। क्या TB6600 उच्च-वर्तमान स्टेपर मोटर्स का समर्थन कर सकता है?
हां, TB6600 4.5A तक संभाल सकता है, जिससे यह स्टेपर मोटर्स के साथ संगत हो जाता है, जो इस वर्तमान तक रेटेड है।
4। मैं TB6600 का उपयोग करके मोटर दिशा को कैसे उलट सकता हूं?
मोटर दिशा को उलटने के लिए, नियंत्रण पिन पर इनपुट सिग्नल अनुक्रम को स्विच करें (जैसे, आगे के लिए IN1-IN2-IN3-IN4, रिवर्स के लिए IN4-IN3-IN2-IN1)।
5। क्या मैं एक स्टेपर मोटर को 4 से अधिक तारों के साथ TB6600 से जोड़ सकता हूं?
TB6600 4-वायर स्टेपर मोटर्स के लिए बनाया गया है।यदि आपकी मोटर में 4 से अधिक तार हैं, तो आपको एक अलग ड्राइवर की आवश्यकता होगी।
6। क्या TB6600 एक NEMA23 स्टेपर मोटर के साथ संगत है?
TB6600 NEMA17 मोटर्स के साथ अच्छी तरह से काम करता है, लेकिन आम तौर पर NEMA23 मोटर्स के लिए उनकी उच्च वर्तमान आवश्यकताओं के कारण अनुपयुक्त है।

E18-D80NK समायोज्य IR सेंसर के लिए एक पूर्ण गाइड
2024/12/12 पर
DS3231 RTC मॉड्यूल ने समझाया: पिन आरेख, चश्मा, और माइक्रोकंट्रोलर इंटरफेसिंग
2024/12/12 पर
लोकप्रिय लेख
-

कॉम्प्लेक्स इंस्ट्रक्शन सेट कंप्यूटर: उन्होंने कंप्यूटिंग को कैसे बदला?
8000/04/18 पर 147757
-

यूएसबी-सी पिनआउट और सुविधाएँ
2000/04/18 पर 111935
-

Xilinx यूनिफाइड सिमुलेशन प्राइमिटिव्स का उपयोग करना: FPGA डिजाइन और सिमुलेशन के लिए एक व्यापक गाइड
1600/04/18 पर 111349
-

इलेक्ट्रॉनिक्स में विद्युत आपूर्ति वोल्टेज: वीसीसी, वीडीडी, वीईई, वीएसएस और जीएनडी का अर्थ
0400/04/18 पर 83719
-

RJ45 कनेक्टर गाइड: पिनआउट, वायरिंग, केबल प्रकार, और उपयोग
1970/01/1 पर 79508
-

आधुनिक विद्युत प्रणालियों में वायर रंग कोड के लिए अंतिम गाइड
जिस तरह से हमारे इलेक्ट्रिकल सिस्टम रंगों का उपयोग करते हैं, वह केवल लुक के लिए नहीं है।प्रत्येक तार का रंग अब एक विशिष्ट फ़ंक्शन को इंगित करता है, जिससे स्थापना और रखरखाव के दौरान विद्युत घटकों को...1970/01/1 पर 66903
-

पर्ज वाल्व गाइड: इष्टतम इंजन प्रदर्शन के लिए फ़ंक्शन, लक्षण, परीक्षण और प्रतिस्थापन
पर्ज वाल्व एक कार की प्रणाली का एक महत्वपूर्ण हिस्सा है जो वायुमंडल में भागने से पहले ईंधन वाष्प को प्रबंधित करके हवा को साफ रखने में मदद करता है।यह न केवल प्रदूषण को कम करके पर्यावरण में मदद करता ...1970/01/1 पर 63027
-

गुणवत्ता (क्यू) कारक: समीकरण और अनुप्रयोग
गुणवत्ता कारक, या 'क्यू', यह जाँच करते समय महत्वपूर्ण है कि रेडियो आवृत्तियों (आरएफ) का उपयोग करने वाले इलेक्ट्रॉनिक सिस्टम में कितनी अच्छी तरह से इंडक्टर्स और रेज़ोनेटर काम करते हैं।'क्यू' मापता ह...1970/01/1 पर 63010
-

अधिकतम बिजली हस्तांतरण प्रमेय के साथ शिखर प्रदर्शन प्राप्त करना
अधिकतम पावर ट्रांसफर प्रमेय बताता है कि कैसे एक स्रोत से ऊर्जा, जैसे कि बैटरी या जनरेटर, एक जुड़े लोड में बहती है।यह सटीक स्थिति दिखाता है जहां लोड सबसे अधिक शक्ति प्राप्त करता है।इस लेख में शामिल ...1970/01/1 पर 54081
-

A23 बैटरी विनिर्देशों और संगतता
A23 बैटरी उच्च वोल्टेज के साथ एक छोटी, सिलेंडर के आकार की बैटरी है।जिसे 23A, 23AE, या MN21 भी कहा जाता है, यह 12 वोल्ट पर चलता है और AA या AAA बैटरी की तुलना में बहुत अधिक है।इसका विशेष डि...1970/01/1 पर 52121
हॉट पार्ट नंबर
-

LCMXO2280C-5FTN324C
Lattice Semiconductor Corporation
IC FPGA 271 I/O 324FTBGA
KBP202G
Diodes Incorporated
BRIDGE RECT 1PHASE 200V 2A KBP
C5750X5R2A475K230KA
TDK Corporation
CAP CER 4.7UF 100V X5R 2220
GRM2165C1H472JA01D
Murata Electronics
CAP CER 4700PF 50V C0G/NP0 0805
LTC3835EFE#PBF
Analog Devices Inc.
IC REG CTRLR BUCK 20TSSOP
CPC1943GS
IXYS Integrated Circuits Division
SSR RELAY SPST-NO 500MA 0-400V
MPC5121YVY400B
NXP USA Inc.
IC MCU 32BIT ROMLESS 516FPBGA
1N5399
NTE Electronics, Inc
DIODE GEN PURP 1KV 1.5A DO15
1210GA470KAT1A
KYOCERA AVX
CAP CER 47PF 2KV NP0 1210
IR3507MTRPBF
Infineon Technologies
IC XPHASE3 CONTROL 20-MLPQ
M27C2001-10B1
STMicroelectronics
IC EPROM 2MBIT PARALLEL 32DIP
1N3288
Microchip Technology
STANDARD RECTIFIER
SI4942DY-T1-E3
Vishay Siliconix
MOSFET 2N-CH 40V 5.3A 8-SOIC
FQB6N80TM
onsemi
MOSFET N-CH 800V 5.8A D2PAK
NB7L14MMNG
onsemi
IC CLK BUFFER 1:4 8GHZ 16QFN
GRM0336R1E8R8DD01D
Murata Electronics
CAP CER 8.8PF 25V R2H 0201
SP6205ER-L-2-5
MaxLinear, Inc.
IC REG LINEAR 2.5V 500MA 8DFN
ISL28196FHZ-T7
Renesas Electronics America Inc
IC COMPARATOR 1 GEN PUR 6SOT -

LMX2571NJKT
Texas Instruments
IC FREQ SYNTH 36WQFN
ADAS1000-2BSTZ-RL
Analog Devices Inc.
IC AFE 5 CHAN 19BIT 64LQFP
FH41-50S-0.5SH(05)
Hirose Electric Co Ltd
CONN FFC BOTTOM 50POS 0.5MM R/A
RN242CST2RA
Rohm Semiconductor
RF DIODE PIN 30V VMN2
C1608X7R1E105K080AB
TDK Corporation
CAP CER 1UF 25V X7R 0603
VI-25L-MV
Vicor Corporation
DC DC CONVERTER 28V 150W
ATMEGA328-PU
Microchip Technology
IC MCU 8BIT 32KB FLASH 28DIP
FCP165N65S3R0
onsemi
MOSFET N-CH 650V 19A TO220-3
STPS3L60RL
STMicroelectronics
DIODE SCHOTTKY 60V 3A DO201AD
NDS336P
onsemi
MOSFET P-CH 20V 1.2A SUPERSOT3
BCM5482SA1KFBG
Broadcom Limited
DUAL PORT 10/100/1000BASE-T PH
AUIRFS8407TRL
Infineon Technologies
MOSFET N-CH 40V 195A D2PAK
CL31B474KAFNNNE
Samsung Electro-Mechanics
CAP CER 0.47UF 25V X7R 1206
LM2588SX-12
Texas Instruments
IC REG MULT CONFG 12V 5A TO263-7
W83775G
Nuvoton Technology Corporation
SENSOR DIGITAL -40C-125C 10TSSOP
LTC6244HVIMS8#TRPBF
Analog Devices Inc.
IC CMOS 2 CIRCUIT 8MSOP
78119-1258
Molex
0.5 FPC CONN. VERTICAL SMT NON-Z
MC10H124MEL
onsemi
IC TRANSLATOR UNIDIR 16SOEIAJ -

VI-J14-CZ
Vicor Corporation
DC DC CONVERTER 48V 25W
SIZ910DT-T1-GE3
Vishay Siliconix
MOSFET 2N-CH 30V 40A POWERPAIR
EPF10K30EFC256-1
Altera
IC FPGA 176 I/O 256FBGA
SN74HC373AN
Texas Instruments
IC DTYPE LATCH OCTAL 20DIP
FT24C02A-KTR-T
Fremont Micro Devices Ltd
IC EEPROM 2KBIT I2C 1MHZ 8TSSOP
175975-2
TE Connectivity AMP Connectors
CONN HEADER R/A 20POS 2.5MM
FAN7554
onsemi
IC REG CTLR FLYBK/FWRD CONV 8DIP
UCV1E102MNL1GS
Nichicon
CAP ALUM 1000UF 20% 25V SMD
006208520310000/+
KYOCERA AVX
CONN FFC FPC VERT 20POS 1MM SMD
55932-0730
Molex
2.0 WTB PLG HSG ASSY STR W/O BOS
FDB33N25TM
Fairchild Semiconductor
POWER FIELD-EFFECT TRANSISTOR, 3
B0530WS-7-F
Diodes Incorporated
DIODE SCHOTTKY 30V 500MA SOD323
M27C256B-90C1
STMicroelectronics
IC EPROM 256KBIT PARALLEL 32PLCC
XC4085XLA-09BG432C
AMD
FPGA, 3136 CLBS, 55000 GATES
UCD3020ARGZR
Texas Instruments
IC DGTL PWR CTRLR 48VQFN
TPS74401RGWR
Texas Instruments
IC REG LINEAR POS ADJ 3A 20VQFN
CL21B222KBANNNC
Samsung Electro-Mechanics
CAP CER 2200PF 50V X7R 0805
THS4061IDRG4
Texas Instruments
IC VOLTAGE FEEDBACK 1 CIRC 8SOIC